Information sharing between devices
Demo
Step-by-step process
To setup the hardware, we provide the step-by-step setup process as follows:
Step 1
Set up the router wifi gateway IP address in the router admin website, normally you should find it on the label of your router.
Step 2
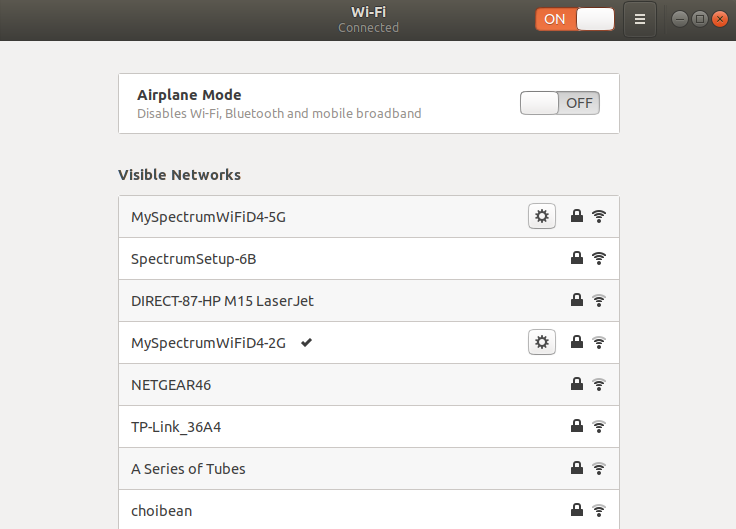
Make sure both Machine A and Machine B are connecting to the same network.
Set up the fixed IP for different machine in a same network.
For machine A(xin):
For example, you can set IP of this machine to be 192.168.2.50 :
For machine B(carma):
For example, you can set the IP of this machine to be 192.168.2.155
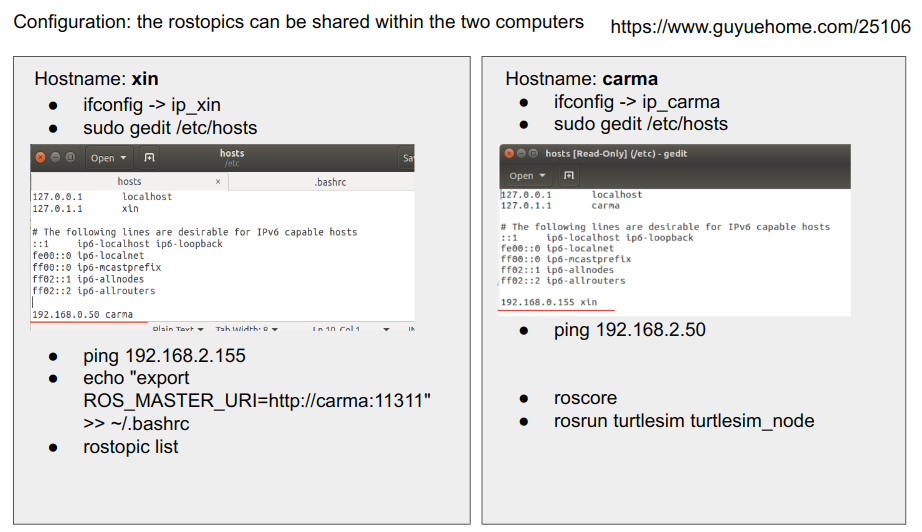
Step 3
Set up the configuration in the /etc/hosts:
Step 4
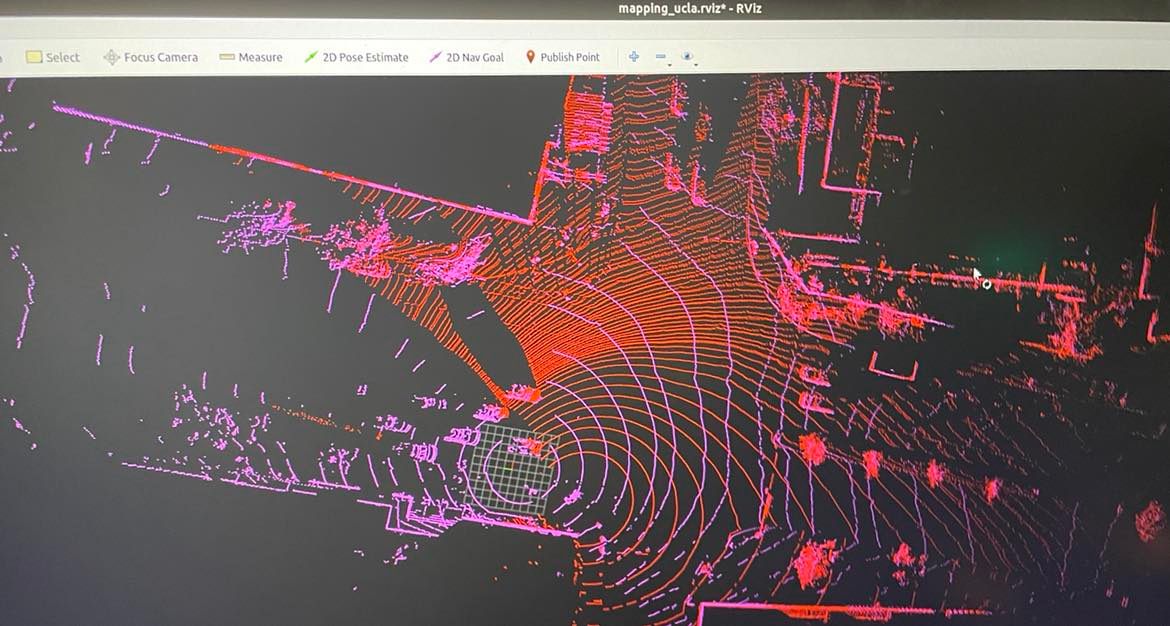
In the intersection computer, using the ros code in the catkin_ws_intersection_merge directory to merge both lidar from infra and vehicle.
Navigate to the catkin_ws_intersection_merge:
catkin_make
source devel/setup.bash
roslaunch mapping_ucla-main mapping_ucla.launch
ROS2
Reference
[1] https://www.guyuehome.com/25106