Smart intersection infra
Demo
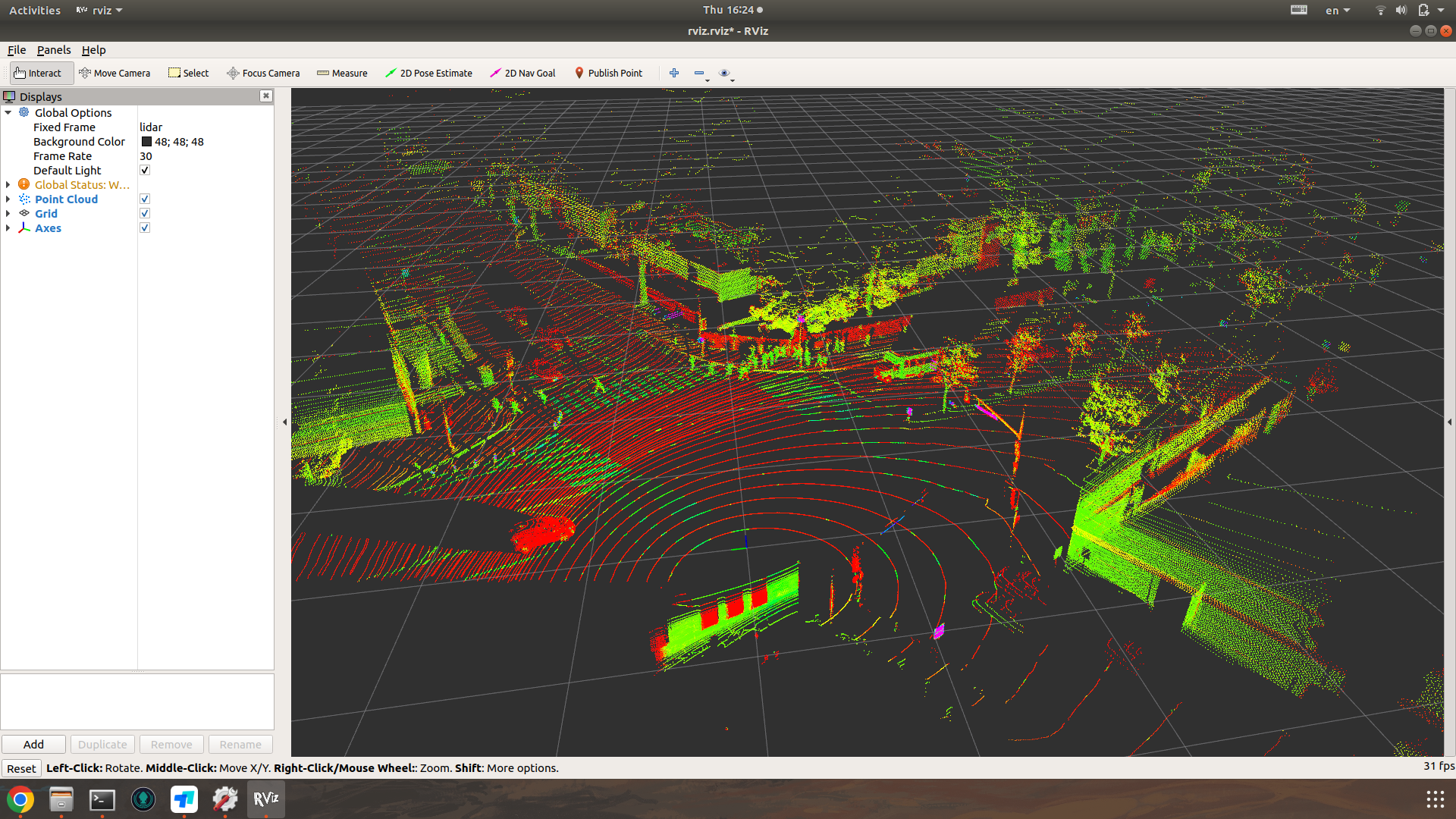
For lidar, you should see something like this:
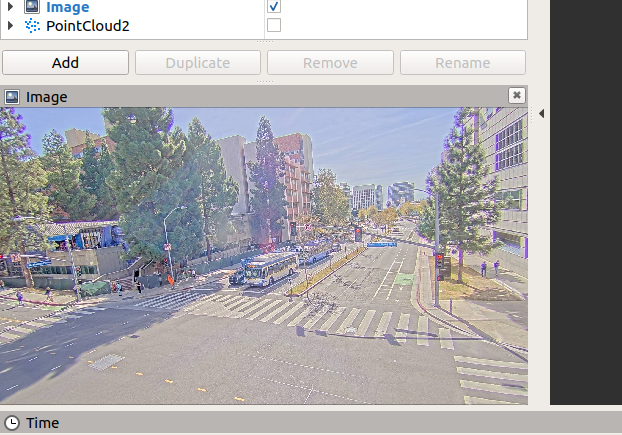
For Camera data, you should something like this:
Step-by-step process
Step 1
Copy the code/InnovizAPI-main to the ~/
Step 2
Navigate to the InnovizAPI-main/ros/catkin_ws
And compile the code:
catkin_make
If there is any error and package missing, just install the corresponding ros package, for example:
sudo apt-get install ros-melodic-gps-umd
Step 3
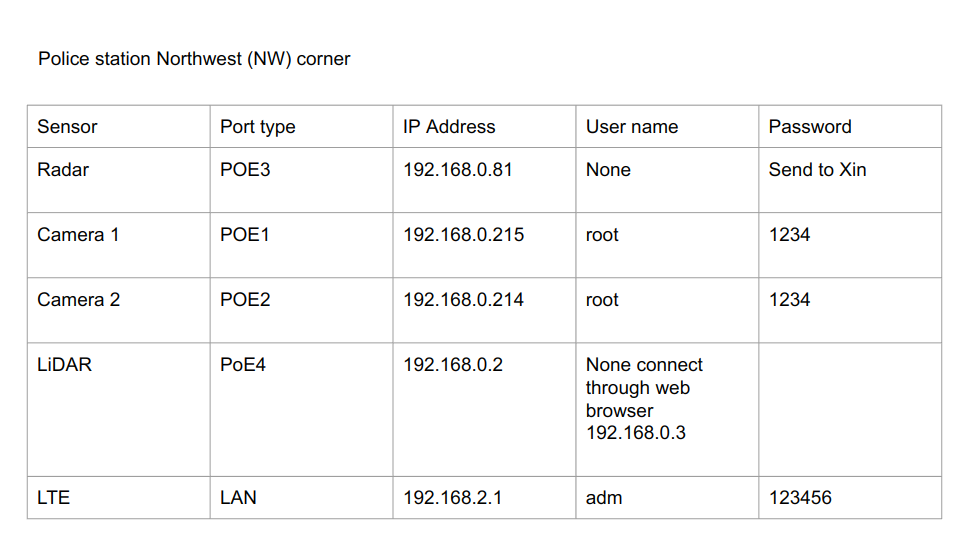
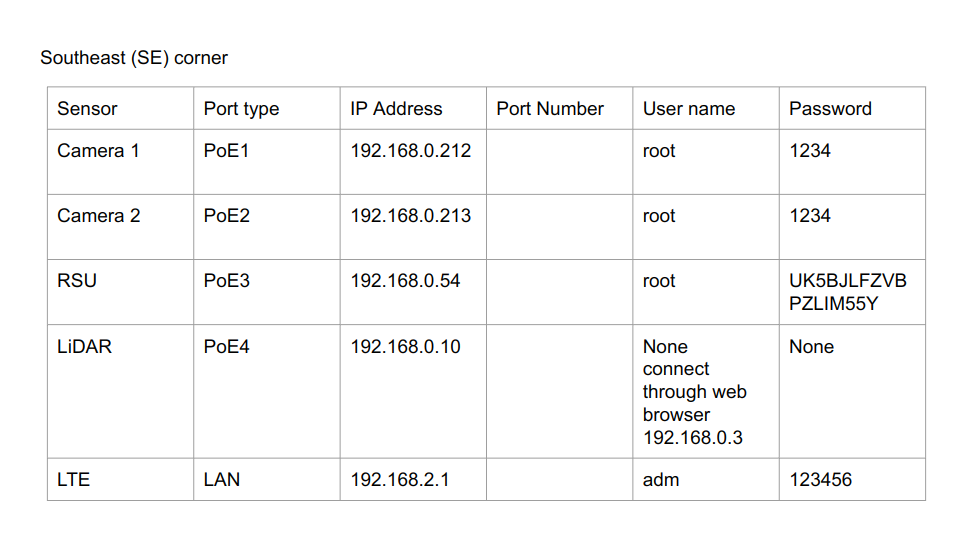
Connect the corresponding wire cable to the laptop and set up the WLAN ip to be: 192.168.0.x
Note: In 192.168.0.x, the x should be a number that is not same as the infra ip, which are shown below:
Step 4
Still in the InnovizAPI-main/ros/catkin_ws :
source devel/setup.bash
Launch the smart_intersection_se:
roslaunch smart_intersection_se smart_intersection_se.launch
Before you launch the above command, you need to modify the code in the smart_intersection_se.launch, uncomment the code that you need to launch and comment out the code that you don’t need.
Like the code below, we need to launch the camera 5 and show it in the rviz.
<?xml version="1.0"?>
<launch>
<!-- rviz -->
<arg name="rviz" default="true" />
<group if="$(arg rviz)">
<node launch-prefix="nice" pkg="rviz" type="rviz" name="rviz_" args="-d $(find smart_intersection_se)/rviz/rviz.rviz" />
</group>
<!-- axis camera 1 -->
<!-- <include file="$(find axis_camera)/launch/axis212.launch">
<arg name="camera_name" default="axis212" />
<arg name="hostname" default="192.168.0.212" />
<arg name="enable_theora" default="0" />
<arg name="enable_ptz" default="0" />
<arg name="enable_ptz_teleop" default="0" />
<arg name="width" default="1920" />
<arg name="height" default="1080" />
<arg name="camera" default="1" />
</include> -->
<!-- axis camera 2 -->
<!-- <include file="$(find axis_camera)/launch/axis213.launch">
<arg name="camera_name" default="axis213" />
<arg name="hostname" default="192.168.0.213" />
<arg name="enable_theora" default="0" />
<arg name="enable_ptz" default="0" />
<arg name="enable_ptz_teleop" default="0" />
<arg name="width" default="1920" />
<arg name="height" default="1080" />
<arg name="camera" default="1" />
</include> -->
<!-- axis camera 4 -->
<!-- <include file="$(find axis_camera)/launch/axis214.launch">
<arg name="camera_name" default="axis214" />
<arg name="hostname" default="192.168.0.214" />
<arg name="enable_theora" default="0" />
<arg name="enable_ptz" default="0" />
<arg name="enable_ptz_teleop" default="0" />
<arg name="width" default="1920" />
<arg name="height" default="1080" />
<arg name="camera" default="1" />
</include> -->
<!-- axis camera 5 -->
<include file="$(find axis_camera)/launch/axis215.launch">
<arg name="camera_name" default="axis215" />
<arg name="hostname" default="192.168.0.215" />
<arg name="enable_theora" default="0" />
<arg name="enable_ptz" default="0" />
<arg name="enable_ptz_teleop" default="0" />
<arg name="width" default="1920" />
<arg name="height" default="1080" />
<arg name="camera" default="1" />
</include>
<!-- LiDAR -->
<!-- <include file="$(find innoviz_ros)/launch/innoviz_ros.launch">
<arg name="config_file_path" default="$(find innoviz_ros)/examples/lidar_configuration_files/om_ignore_blooming_config.json" />
<arg name="get_attributes_timeout" default="1000"/>
<arg name="ref0" default="invz_reflection_0"/>
<arg name="ref1" default="invz_reflection_1" />
<arg name="ref2" default="invz_reflection_2" />
<arg name="summation" default="invz_summation_reflection" />
<arg name="invz_log_path" default="" />
<arg name="invz_log_level" default="3" />
<arg name="ros_log_level" default="1" />
<arg name="recording_file_path" default="" />
<arg name="fpa" default="0.02" />
<arg name="frame_id" default="innoviz_lidar" />
<arg name="pcl_timestamp_option" default="published"/>
</include> -->
</launch>